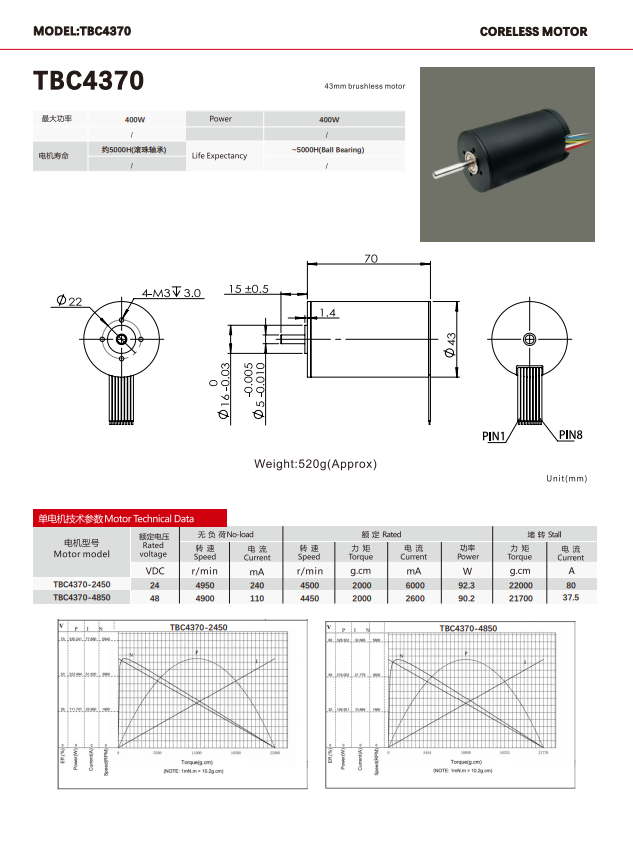
Мотор TBC4370 бо садои пасти 24V 48V 43mm танзимшаванда, магнити доимии BLDC, муҳаррики барқии бе хасу DC, муҳаррики беасос





1. Гардишдиҳандаи магнитии доимии баландсифат, зичии баланди энергия
Истифодаи магнитҳои доимии баландсифат дар якҷоягӣ бо сохтори беасоси косаи холӣ, талафоти ҷараёни гирдбод бартараф карда мешавад ва самаранокии табдили қувва >90% -ро ташкил медиҳад, ки барои сенарияҳои кори пайваста бо бори баланд мувофиқ аст.
2. Мӯҳлати хидматрасонии хеле дароз ва эътимоднокӣ
Тарҳи бечӯтка фарсудашавии чӯткаро комилан аз байн мебарад ва бо подшипникҳои сафолӣ ва қуттиҳои фишанги пурра металлӣ, мӯҳлати хизмати онҳо зиёда аз 10,000 соатро ташкил медиҳад, ки ба талаботи кори 7×24 соати таҷҳизоти саноатӣ ҷавобгӯ мебошад.
3. Беҳсозии садо ва ларзиши хеле паст
Ротори косаи холӣ талафоти гистерезис надорад, дар якҷоягӣ бо тарҳи схемаи магнитии симметрӣ ва калибрченкунии дақиқи тавозуни динамикӣ, садои корӣ <40dB аст, ки барои сенарияҳои ҳассоси акустикӣ мувофиқ аст.
4. Мутобиқати васеи шиддат ва ҳифзи интеллектуалӣ
Вуруди дугонаи шиддати 24V/48V, схемаҳои муҳофизатии пайвасти дарунсохт аз ҷараёни аз ҳад зиёд, гармии аз ҳад зиёд ва баръаксро дастгирӣ мекунад, ба батареяҳои литий ё манбаъҳои барқи DC-и саноатӣ мутобиқ мешавад ва кори устуворро дар шароити мураккаби корӣ таъмин мекунад.
5. Моменти баланд ва вокуниши динамикӣ
Моменти номиналиро метавон барои дастгирии гузариши фаврии сарборӣ (масалан, оғоз ва қатъи босуръати хатҳои истеҳсолии автоматӣ, ҳаракатҳои басомади баланди пайвандҳои робот) танзим кард.
1. Тарроҳии модулии ҳамгирошуда
Диаметри паймонаш 32 мм, сохтори чоҳи холӣ ё чоҳи дукаратаи баромадро дастгирӣ мекунад, рамзгузорҳо, тормозҳо ё вентиляторҳои хунуккуниро ба осонӣ муттаҳид мекунад ва ба дастҳои роботии дараҷаи озодии бисёрдараҷа мутобиқ мешавад.
2. Мутобиқати идоракунии интеллектуалӣ
Алгоритми FOC-ро дастгирӣ мекунад, ки бо рамзгузори мутлақи сенсори Холл/чангҳои бисёргардиш муҷаҳҳаз шудааст, дақиқии такрории мавқеъ ±0.02°, дақиқии назорати суръат ±0.5%, ки ба талаботи дақиқии баланди дастгоҳҳои CNC, платформаҳои оптикии дақиқ ва ғайра ҷавобгӯ аст.
3. Мутобиқсозии қуттии редуктори бисёрмарҳилавӣ
Он метавонад бо қуттии фишанги коҳиши сайёравӣ муҷаҳҳаз бошад, ки моменти максималии баромади он 20Н·м аст ва сенарияҳои бори вазнини пастсуръат ё сабуки баландсуръатро дастгирӣ мекунад.
4. Дахолати электромагнитии паст ва сертификатсияи пурра
Сертификатсияи CE ва RoHS, мувофиқ бо таҷҳизоти тиббӣ (роботҳои бо ёрии MRI) ва таҷҳизоти коммуникатсионӣ (системаи танзими антеннаи истгоҳи пойгоҳи 5G).
1. Автоматикунонии саноатӣ ва робототехника
Дасти роботии вазнин: Роботи кафшери автомобилӣ, ки гардонандаи муштарак дорад (талабот ба моменти ягона 3-6N·m), Механизми тағир додани асбоби асбоби CNC.
Автоматикунонии логистика: меҳвари бардорандаи мошини боркаши стереоскопии анбор, чархҳои гардонандаи мошини экспресс-ҷудокунӣ.
Коркарди дақиқ: Манипулятори коркарди вафли нимноқилҳо, модули танзими фокуси мошини буриши лазерӣ.
2. Таҷҳизоти тиббӣ ва лабораторӣ
Ташхиси тасвирӣ: Дастгоҳи компютерии CT, ки гардонандаи рафи гардишкунанда дорад, механизми танзими бисёрченакаи зондҳои ултрасадо.
Роботи ҷарроҳӣ: Модули қувваи бозуи роботии навигатсия бо истифода аз ортопедӣ, буғуми даст бо асбоби ҷарроҳӣ бо истифода аз ҳадди ақали инвазивӣ.
Асбобҳои лабораторӣ: Сентрифуга бо ротори баландсуръат, системаи автоматии тақсимоти моеъи намунавӣ.
3. Дастгоҳҳои интеллектуалии баландсифат
Хонаи интеллектуалӣ: Курсии массажии баландсифат бо гардонандаи бисёрмеҳварӣ, муҳаррики роҳи оҳани роҳнамои пуриқтидори пардаи интеллектуалӣ.
Майдони нави энергетикӣ: Механизми қулфкунии сари таппончаи пуркунандаи барқ, пайванди гардишкунандаи роботи тозакунандаи панели фотоэлектрикӣ.