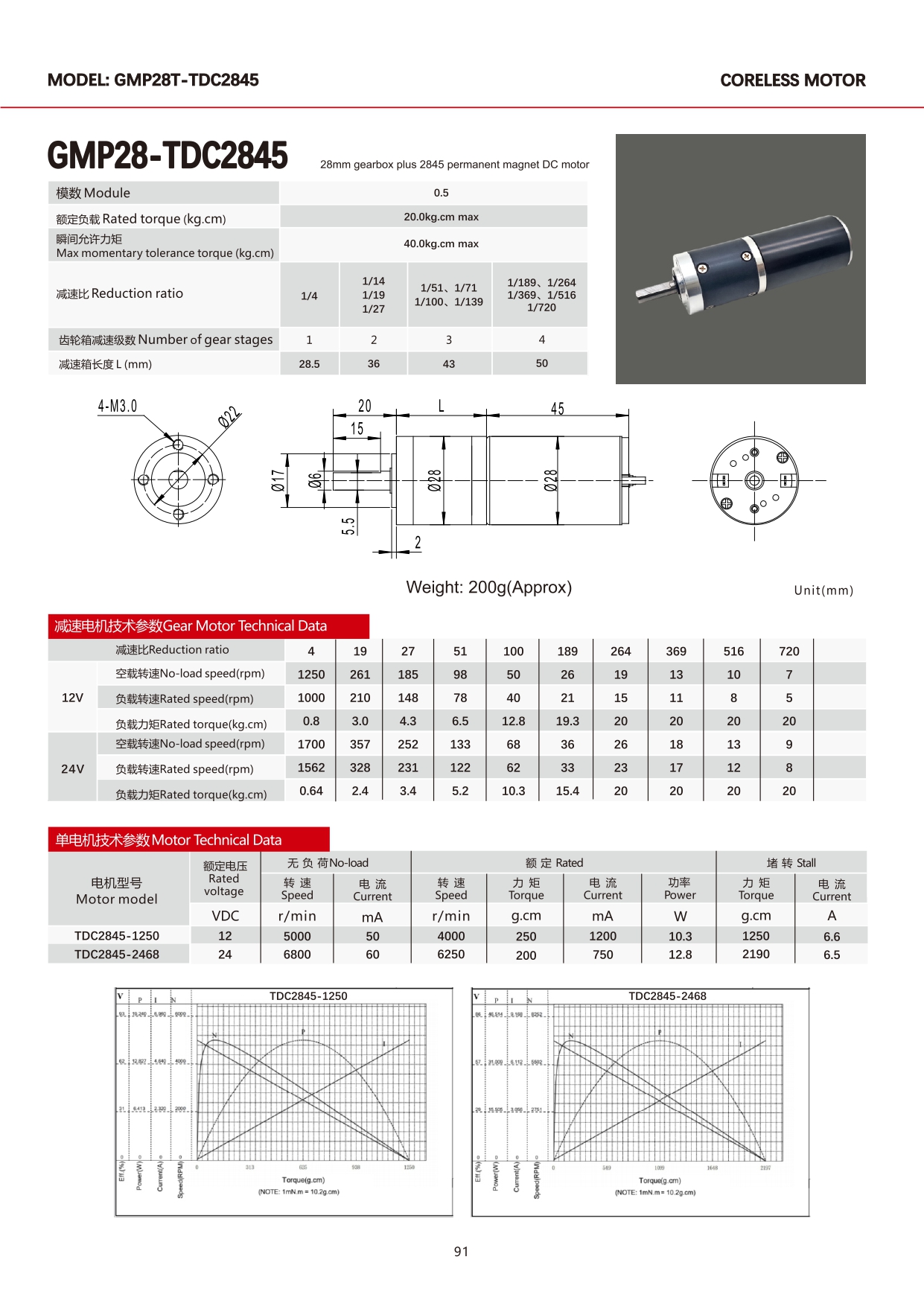
Муҳаррики фишанги сайёравии беасоси хасушудаи 28 мм GMP28-TDC2845 Муҳаррики беасоси DC бо қуттии фишанги металлӣ 12V 24V





Муҳаррики фишанги сайёравии беаслии 28*45 мм ҳамгироии идеалии технологияи беаслии баландсифатро бо фишанги сайёравии дақиқ дар як бастаи паймон ва пуриқтидор ифода мекунад. Ин дастгоҳ муҳаррики беаслии 28 мм-и хасуро бо қуттии фишанги сайёравии мувофиқ муттаҳид мекунад, ки ҳамвории истисноӣ ва хусусиятҳои вокуниши зуди технологияи беаслро, ки бо зичии баланди моменти системаи кам кардани фишанги дақиқ зарб карда шудаанд, таъмин мекунад. Натиҷа ҳалли гардонандаест, ки ҳам кори динамикии заруриро барои назорати дақиқ ва ҳам моменти баромади заруриро барои рондани борҳои воқеӣ дар доираи лифофаи дарозии 45 мм таъмин мекунад.
Зичии баланди моменти чархзанӣ: Омезиши технологияи муҳаррики беасл бо фишанги сайёрӣ нисбат ба андозаҳои хурди дастгоҳ моменти чархзании истисноиро таъмин мекунад. Моменти чархи баландсуръати муҳаррик ба таври муассир ба қувваи пастсуръат ва моменти чархи баланд табдил дода мешавад, ки ин ҳалли муттаҳидшударо барои барномаҳое, ки фазо маҳдуд аст, аммо қувваи назаррас талаб карда мешавад, беҳтарин мегардонад.
Иҷрои хаттӣ ва пешгӯишаванда: Моторҳои бе ядрои хасушуда хаттии аълоро байни шиддат, суръат ва моменти гардиш нишон медиҳанд. Ин рафтори пешгӯишаванда тарҳи системаи идоракуниро содда мекунад ва имкон медиҳад, ки кори муҳаррик дар шароити гуногуни бор моделсозӣ карда шавад. Қуттии редуктор ин хусусиятҳоро нигоҳ медорад ва ҳангоми зарб кардани моменти баромад .
Мӯҳлати дарозтари корӣ: Системаҳои хасу ва коммутатори баландсифат, ки дар якҷоягӣ бо подшипникҳои дақиқ дар тамоми муҳаррик ва қуттии редуктор истифода мешаванд, кори боэътимодро дар тӯли мӯҳлати дарозтари хизмат таъмин мекунанд. Сохти мустаҳками қуттии редукторҳои сайёравӣ ҳатто дар шароити душвори корӣ ба фарсудашавӣ тобовар аст.
Робототехникаи тиббӣ ва асбобҳои ҷарроҳӣ: Барои асбобҳои ҷарроҳӣ бо робот, протезҳои пуриқтидор ва дастгоҳҳои барқарорсозӣ, ки назорати дақиқи қувва ва фаъолсозии ҳамвор ва вокунишӣ дар шакли паймонро талаб мекунанд, беҳтарин аст.
Автоматикунонии саноатӣ: Барои системаҳои дақиқи ҷойгиркунӣ, гардонандаҳои хурди конвейерӣ, асбобҳои автоматии васлкунӣ ва механизмҳои интихоб ва ҷойгиркунӣ, ки дар онҳо назорати дақиқи ҳаракат ва эътимоднокии баланд муҳим аст, комил аст.
Асбобҳои лабораторӣ ва таҳлилӣ: Дар системаҳои автоматии коркарди намунаҳо, таҷҳизоти дақиқи тақсимкунӣ ва асбобҳои илмӣ истифода мешаванд, ки ҳаракати ҳамвор ва такроршавандаро бо ларзиши ҳадди ақал талаб мекунанд.
Аэрокосмос ва мудофиа: Барои системаҳои фаъолкунандаи ҳавопаймоҳои бесарнишин, механизмҳои ҳадафгирӣ ва таҷҳизоти сайёри коммуникатсионӣ, ки дар онҳо зичии баланди қувва ва эътимоднокӣ талаботи муҳим мебошанд, мувофиқ аст.
Барномаҳои робототехника: Дар пайвандҳои роботҳои муштарак, гардонандаҳои роботҳои хидматрасонӣ ва эффекторҳои ниҳоии чолокона истифода мешаванд, ки ҳам вокуниш ва ҳам нигоҳ доштани моменти моментро дар бастаи сабук талаб мекунанд.