

1. Мушаххасоти иҷрои барқи ҳоким
(1) Диапазони шиддат: DC5V-28V.
(2) Ҷараёни номиналӣ: MAX2A, барои идора кардани муҳаррик бо ҷараёни бештар, хати барқи мотор мустақиман ба таъминоти барқ пайваст мешавад, на тавассути губернатор.
(3) басомади баромади PWM: 0 ~ 100KHz.
(4) Баромади шиддати аналогӣ: 0-5V.
(5) Ҳарорати корӣ: -10 ℃ -70 ℃ Ҳарорати нигоҳдорӣ: -30 ℃ -125 ℃.
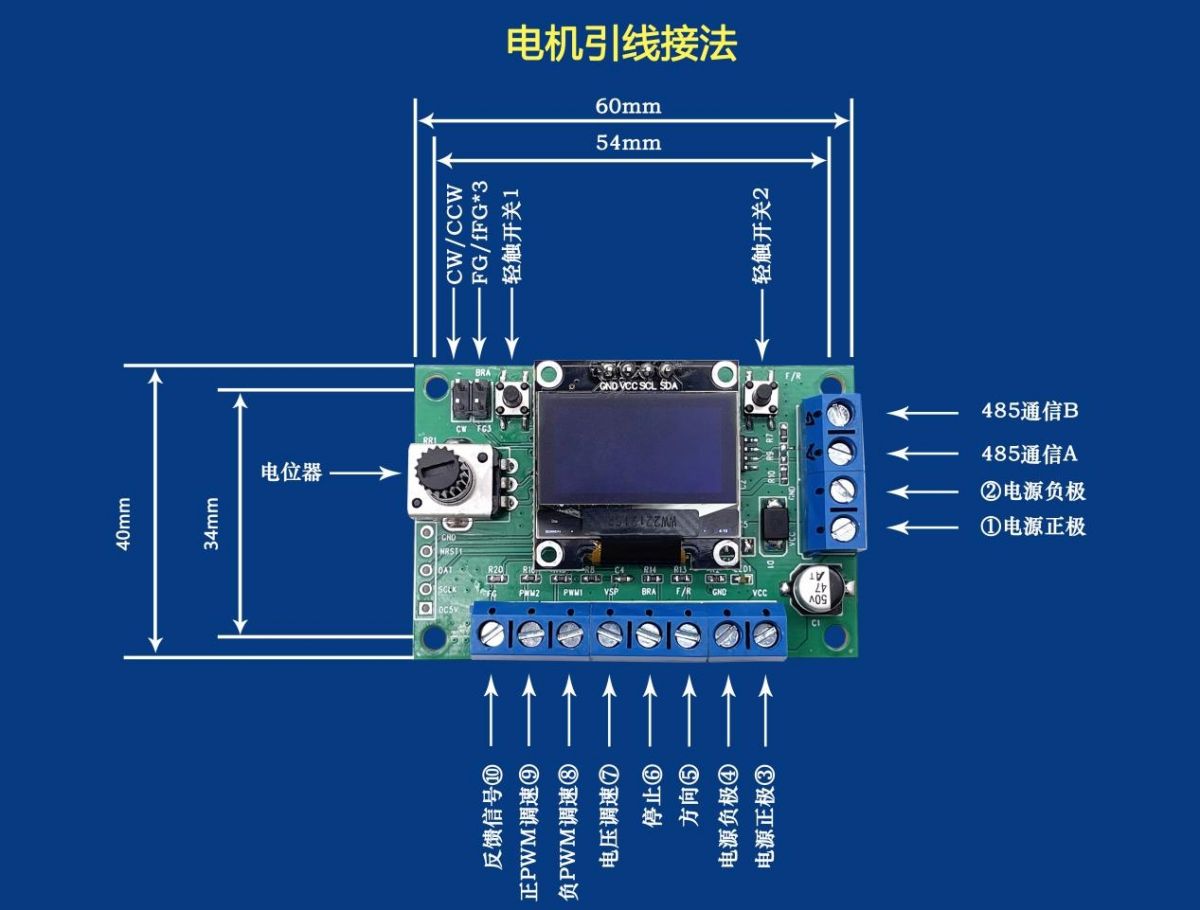
(6) Андозаи тахтаи ронанда: дарозии 60 мм X бари 40 мм

2. Ноқилҳои губернатор ва тавсифи функсияи дохилӣ
① Губернатор, вуруди мусбии таъминоти нерӯи мотор.
② Губернатор, вуруди қувваи мотор манфӣ.
③ Натиҷаи мусбии таъмини қувваи муҳаррик.
④ Баромади манфии таъмини қувваи муҳаррик.
⑤ Баромади сатҳи баланд ва пасти назорати гардиши мусбат ва манфӣ, сатҳи баланд 5V, сатҳи пасти 0V, ки тавассути тугмаи ламсӣ 2 (F/R) идора мешавад, пешфарз сатҳи баланд аст.
⑥ Баромади сатҳи баланд ва пасти назорати тормоз, сатҳи баланд 5V, сатҳи пасти 0V, ки тавассути тугмаи ламсӣ 1 (BRA) идора карда мешавад, барқ дар сатҳи пешфарз.
7 Баромади шиддати аналогӣ (0~5V), ин интерфейс барои қабули муҳаррики танзими суръати шиддати аналогӣ мувофиқ аст.
⑧PWM1 баромади баръакс, ин интерфейс барои моторе мувофиқ аст, ки танзими суръати PWM-ро қабул мекунад ва суръат ба давраи кор мутаносиби баръакс аст.
⑨PWM2 баромади пеш, ин интерфейс барои муҳаррикҳое мувофиқ аст, ки танзими суръати PWM-ро қабул мекунанд, суръат ба давраи вазифа мутаносиб аст.
⑦-⑨ Тағироти сигнали баромади се интерфейс тавассути потенциометр танзим карда мешавад.
⑩ Вуруди сигнали бозгашти мотор.
Эзоҳ: FG/FG*3 бояд ба вақти воқеии фикру мулоҳизаҳои мотор асос ёбад, ки оё илова кардани сарпӯши jumper, ҳеҷ сарпӯши jumper як маротиба FG нест, болопӯши афзоянда 3 маротиба FG*3 аст. Ҳамин чиз ба CW/CCW дахл дорад.
3. Губернатор баъзе Танзимоти параметр
(1) Танзими басомад: пеш аз фурӯзон нашавед, тугмаи ламси 1-ро пахш кунед ва нигоҳ доред ва сипас тахтаи ҳокимро фаъол кунед, интизор шавед, то вақте ки тугма озод карда шавад, дар экран "FEQ: 20K" намоиш дода шавад, пас тугмаи 1-ро барои кам кардани тугма ламс кунед, барои илова кардан тугмаи 2-ро ламс кунед. Басомади танзимшаванда ба басомади муқарраршуда, пешфарз дар завод 20KHz аст.
(2) Шумораи қутбҳои муқарраршуда: пеш аз фурӯзон кардани барқ дар як вақт тугмаи ламси нури 1-ро нигоҳ доред ва тугмаи ламси равшании 2-ро раҳо накунед ва сипас панели ҳокимро ба кор дароред, мунтазир шавед, ки дар экран "" шумораи қутбҳо: 1 қутбӣ" тугмаро раҳо кунед, пас тугмаи ламси равшанӣ 1 кам карда мешавад, тугмаи ламси равшанӣ 2 илова карда мешавад.
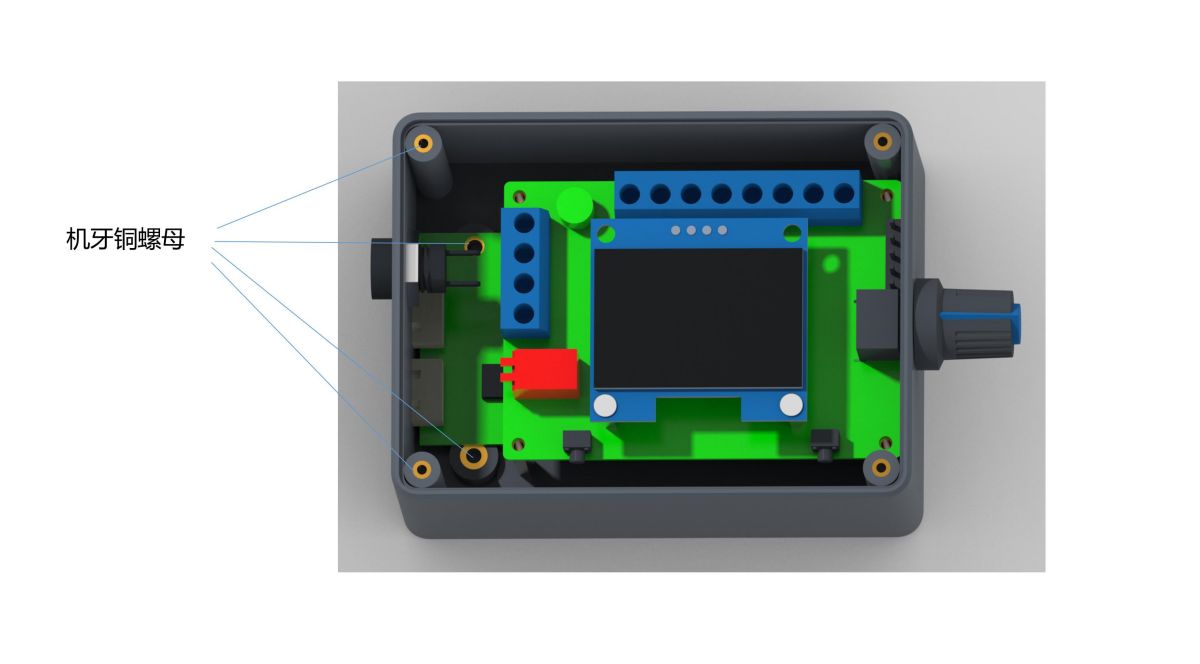
(3) Танзими бозгашт: дар расми 1, pin FG/FG*3 ҳамчун такрори чандкарата муқаррар карда шудааст, ки мувофиқи он, ки мултипликатори бозгашти мотор як маротиба FG ё се маротиба FG аст, илова кардани сарпӯши jumper 3 маротиба FG ва илова накардани сарпӯши jumper як маротиба FG аст.
(4) Танзими самт: Пиндори CW/CCW дар расми 1 танзими самти муҳаррик дар ҳолати аввалаи он мебошад. Он мувофиқи он ки муҳаррик CW ё CCW аст, ҳангоми боздоштани хати идоракунии самти мотор муқаррар карда мешавад. CCW бо сарпӯши гузариш иловашуда, CW бе сарпӯши гузариш.
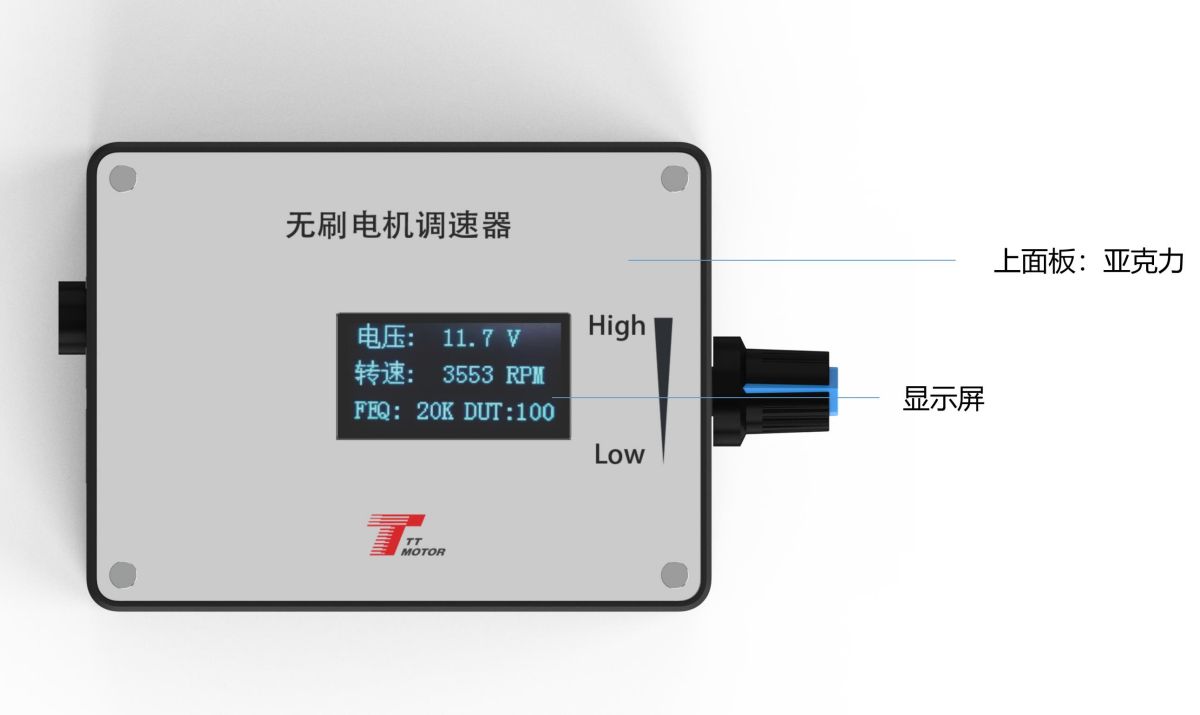
Асосӣ: Экрани ҷорӣ асосан шиддати вуруд, суръат, басомад, давраи кори ин чаҳорро нишон медиҳад. Суръат бояд ба намоиши муқаррарии FG/FG*3, рақами қутб муқаррар карда шавад.


4. Тадбирҳои эҳтиётии губернатор
(1) Таъмини қувваи мусбат ва манфии ҳоким бояд мувофиқи дастурҳо пайваст карда шавад ва набояд баръакс карда шавад, вагарна ҳоким кор карда наметавонад ва ҳокимро сӯзонд.
(2) Губернатор барои мувофиқ кардани мотор бо интерфейси назоратии боло истифода мешавад.
3, ⑤-⑨ Панҷ порт наметавонанд аз шиддати 5V зиёдтар дастрасӣ дошта бошанд.

Вақти фиристодан: июл-21-2023