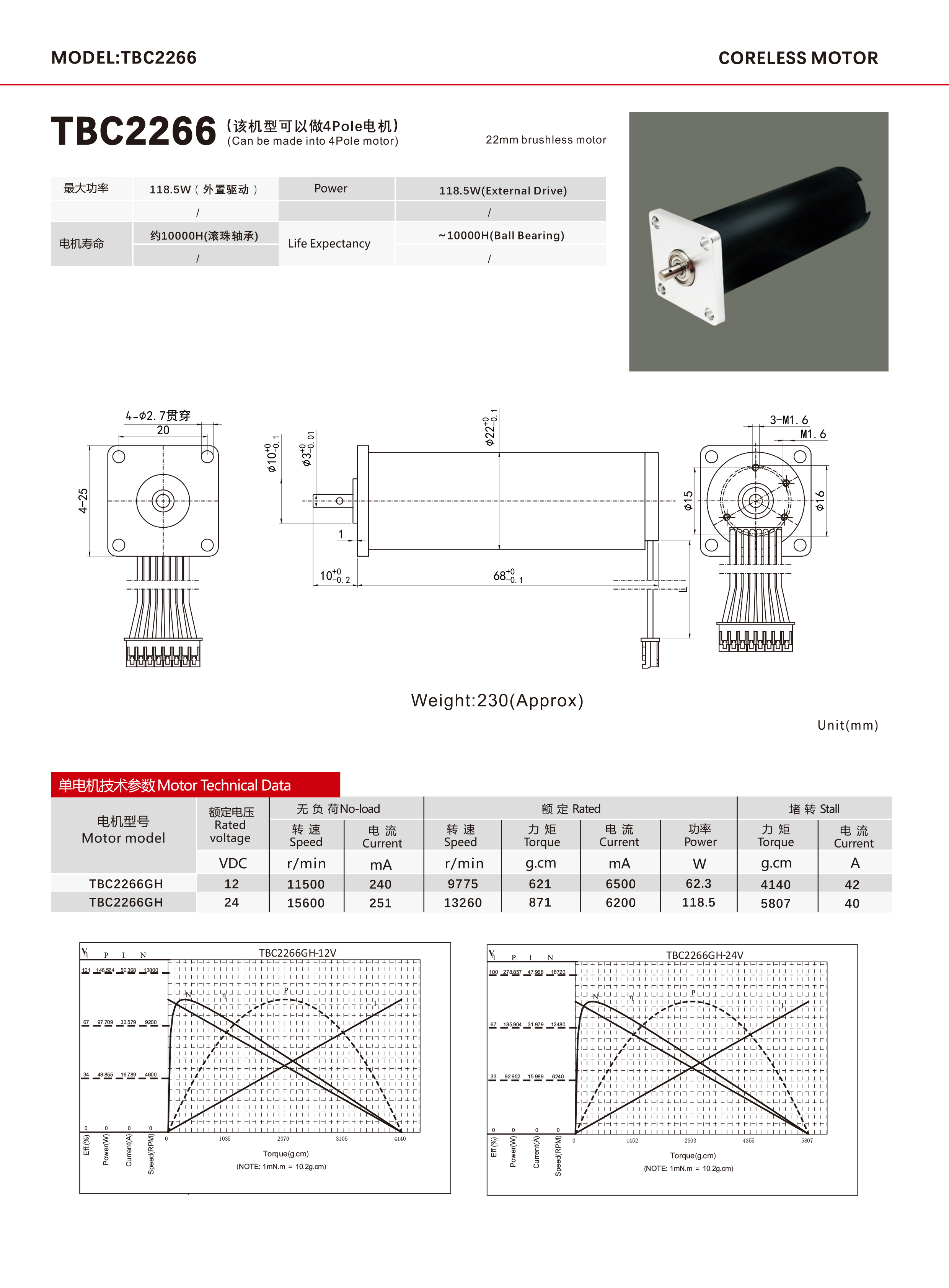
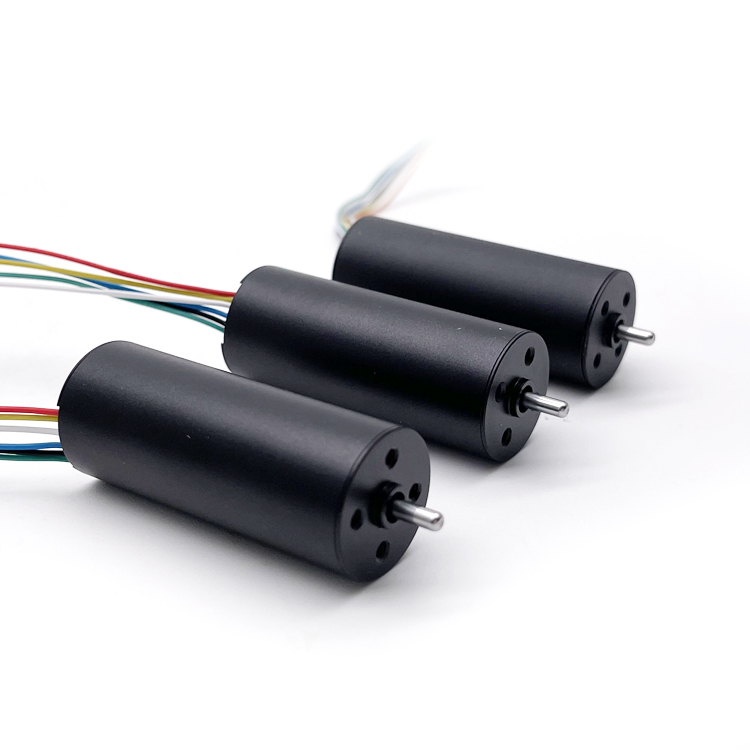
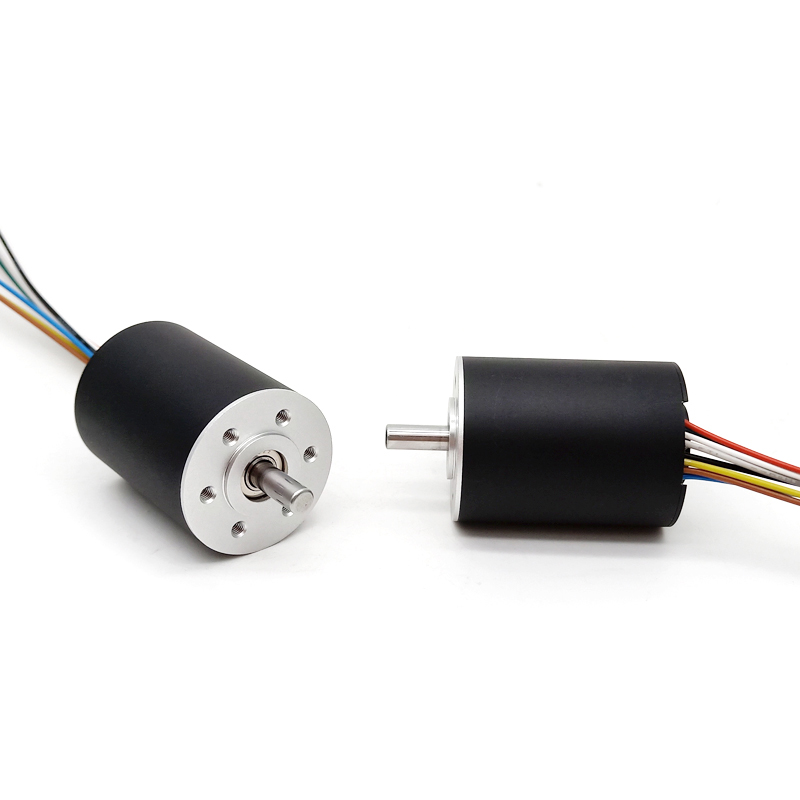
GMP22-TBC2266 22mm Самаранокии баланд DC Coreless Motor





1. Не cogging магнитӣ
2. Сохтори сахтгир ва андозаи хурд
3. Сатҳи баланди табдили энергия
4. Коммутатори бисёрқутбӣ барои кам кардани мавҷи момент
5. Лаҳзаи пасти инерсия, хусусиятҳои хуби серво
6. Фасеҳ бо редуктор ва рамзгузор
7. Муносибати барҷастаи хоси параметри хатӣ
1. Ҳисгари баланд-қудрати печи массиви
2. печи ламинатдори камқувват
Ду намуди печҳои дар боло овардашуда метавонанд ба талаботи параметрҳо асос ёбанд Ба таври дигар интихоб кунед, диаметри сим ва шумораи гардиши сими сирдор ба хусусиятҳои зерин мувофиқат мекунад:
Диаметри сими печ калон аст ва шумораи гардишҳо хурд аст)
Ҷараёни оғози калон)
доимии суръати баланд (қимати баланди КВ))
Диаметри сими печ хурд аст ва гардишҳои печдор бисёранд
Ҷараёни ибтидоии паст
доимии суръати паст (қимати kt паст))
Дар шароити муқаррарӣ, мӯҳлати хизмати мотор ва кори мотор.The муҳити зист таъсири калон мерасонад. Дар муҳити хуб, муҳандисии электрикӣ. Ҳаёти корӣ аз он дар муҳити сахт дарозтар аст. Умуман, мӯҳлати хидмати мо метавонад тақрибан ба 1000 соат расад.
1. Чӣ қадаре ки суръат баланд бошад, фарсудашавии механикии маҷмӯи хасу ҳамон қадар зиёд мешавад.
2. Ҳолати корӣ: басомади баланди оғоз / қатъ ё гузариш ба пеш / баръакс, Басомади баланд мӯҳлати хизмати муҳаррикро метезонад.
3. Боркунӣ Чӣ қадаре ки сарбории ҷорӣ зиёд бошад, фарсудашавӣ ҳамон қадар зиёд мешавад.
4. Муҳит Чанг, ҳарорат/намӣ, ларзиш ва усулҳои насб ҳама ба ҳаёт таъсир мерасонанд.
дарозмуддат самаранокии баланд Не таъсири ковокии зери тарҳи оқилона servo хуб.
Хусусиятҳо Иқтидори изофабори пурқувват Зичии баланди нерӯ Метавонад дар муҳити ҳарорати баланд кор кунад Магнити пурқуввати борро қабул кунед.
Навъи печи муҳаррики бечӯткаи TBC ва муҳаррикҳои чӯби Coreless якхела доранд.
Шакли печондан Хусусиятҳои силсилаи сутунҳои TBC-4: Ротор 2 ҷуфт сутунҳоро бо зичии пурқуввати баланд қабул мекунад Андозаи воқеан хурд ва қудрати баланд Рақам усули массиви чипро қабул мекунад Суръати баланд, баромади моменти баланд Вокуниши босуръати оғозёбӣ.
Калиди қулфи навъи Hall, сенсори Linear Hall (драйвери хаттии Холлро метавон танзим кард), Бе сенсори Хол, Драйвери дохилии дохилӣ, Стерилизатсияи тиббии ҳарорати баланд.
Муҳаррики бемасрафи TBC, ки мӯҳлати хидматрасонии тӯлонӣ ҳангоми мувофиқат бо подшипникҳои NMB то даҳҳо ҳазор соат аст, мӯҳлати хидмат аз суръати баланд, ларзиши мувозинати динамикӣ ва бори подшипник таъсир мерасонад.